
随着电商、物流行业的高速发展,分拣方式的自动化迫在眉睫,人工分拣效率低、错误率高且成本高,而传统自动化拆码垛应用中,往往要求栈板定位精准,且货物规则且尺寸单一,因此大大限制了自动化拆码垛的应用范围,尤其是面对来料完全随机的工况。
针对以上痛点,海康机器人研发并推出了基于机器视觉引导的机械臂拆码垛方案,轻松应对多SKU且来料无序的拆码垛场景,适用于各类箱体、麻包袋、料箱等,有效满足各类客户的仓储分拣自动化需求。

系统介绍
3D视觉引导拆码垛系统由MV-DB1300A双目立体相机和机器人视觉引导平台两大核心组成,3D相机获取货物深度信息及高清2D彩色图像,通过平台软件内置3D视觉算法和智能轨迹规划算法,完成货物定位及分割,并控制机械臂相应的抓取或码放动作。
下图为拆码垛系统组成图,海康机器人提供视觉系统:

系统两大核心组成
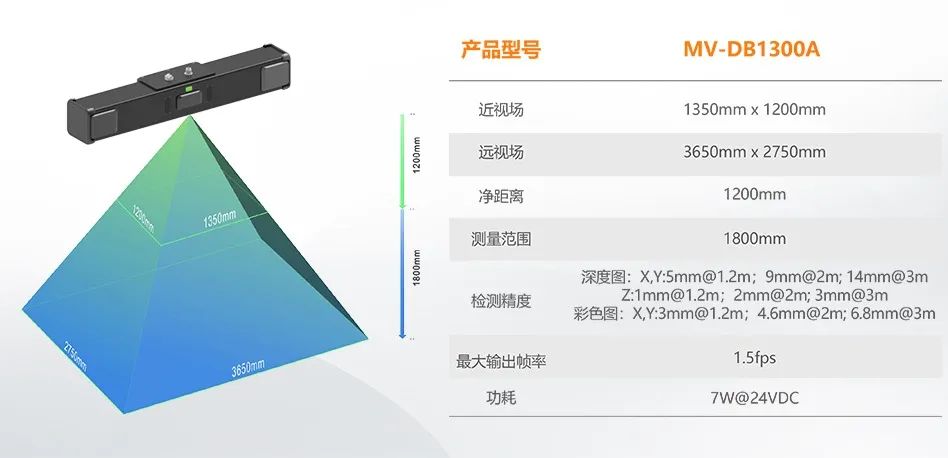
MV-DB1300A双目立体相机
>>>>
高精度
MV-DB1300A具有较大的基线距,同时增加了激光器的数量,搭配独有的混合编码专利技术,使相机的精度进一步提高,Z向深度图精度可达为3mm@3m。

>>>>
抗环境光
结合最新的时域隔离、宽动态及多帧融合技术,MV-DB1300A相机具有优异的抗环境光能力,在30000Lux光照条件下,仍能还原完整的深度信息。

>>>>
自动曝光
典型的物流环境下很难保证3D相机数据采集时光照的一致性,结合自研自动曝光技术,即使物流光照环境不断变化依然能保证3D相机采集数据的稳定可靠,确保了整个拆码垛系统的稳定性与适应性。
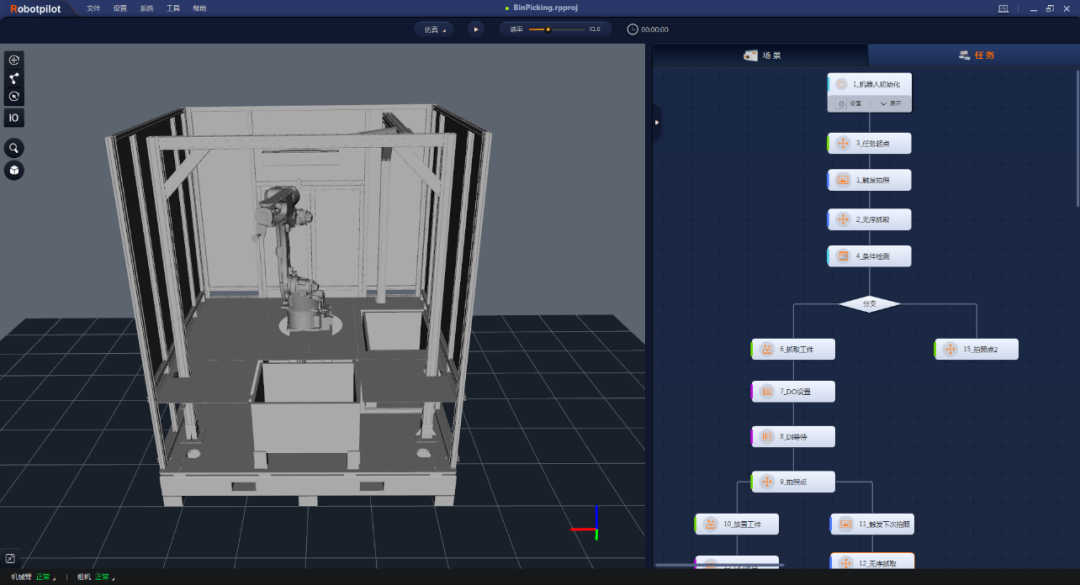
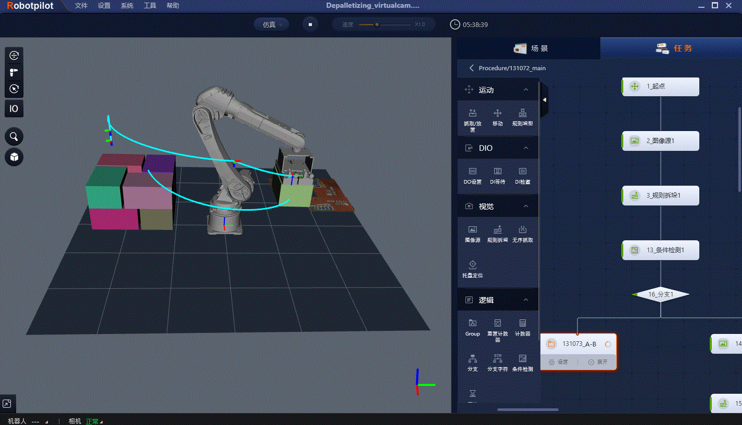
RobotPilot机器人视觉引导平台
>>>>
图形化编程界面
RobotPilot采用图形化,无代码式的编程界面,简单易用。

>>>>
全流程仿真模拟
通过物理模拟,能够仿真真实的项目搭建状态,实时合成图像,无需实际工件和相机安装架设。可缩短开发周期,提高效率。
>>>>
六步快速搭建
RobotPilot面向实施交付总结了一套六步部署法,并以流程引导的方式融入到软件的设计中,通过六步部署,用户可快速完成视觉引导应用的搭建。

>>>>
内置视觉算法
拆码垛视觉定位模块采用AI深度学习+3D点云分割的方案。深度学习网络对RGB图进行包裹的粗定位,并利用物体表面纹理特征和点云边缘特征进行包裹精定位。
>>>>
内置轨迹规划算法
软件内置轨迹规划、碰撞检测及抓取规划等多种智能算法,实时规划机械臂行走路径。
应用案例
■ 大型电器制造工厂 | 视觉引导散热片拆垛
背景与挑战:该企业生产环节中存在大量不同尺寸规格散热片的拆垛上料需求,垛形较高,人工搬运困难,且相邻物料间存在隔板,工件存在公差,传统2D视觉定位方案无法适配此应用情景。

方案优势:
-
轻松适配工厂内现有的多种工件尺寸
-
7*24小时全流程自动化,无需人工干预
■ 大型化工厂 | 视觉引导麻包袋拆垛上料
背景与挑战:项目现场拆垛对象均为麻包袋,质地较为柔软,易变性,且来料前均为人工码垛,垛形很难保证统一性,依靠机械臂固定位置示教的方式很难保证抓取的成功率,易掉包。

方案优势:
-
视觉系统实时拍照定位,轻松应对多变的垛形
-
视觉定位算法具有较强鲁棒性,轻松应对褶皱、倾斜、白色高反、挤压变形等情况
-
智能规划拆垛顺序,避免撞包,挤压等问题
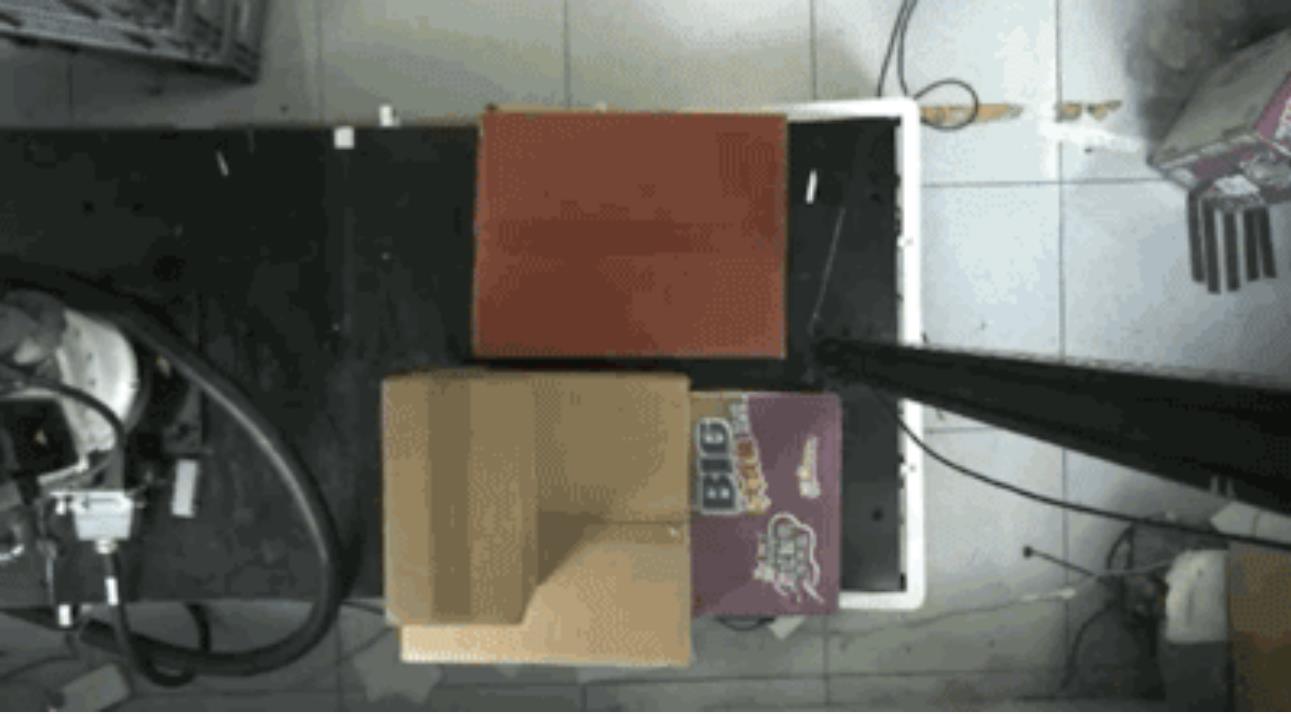
■ 大型3C工厂 | 视觉引导纸箱拆垛
背景与挑战:该企业成品仓出库环节存在大量不同规格纸箱的拆垛需求,同一托盘上存在多SKU的情况,且需要配合AMR和读码器等完成整套的自动化出库动作,流程复杂。

方案优势:
-
大景深、大视野,轻松适配1.8m垛形
-
支持规划吸盘偏置,实现单一吸盘应对不同大小的箱体
-
轻松应对各种箱体,如黑色或白色纸箱,表面存在胶带绑带等箱体等
-
支持单SKU单拆,单SKU多拆,多SKU混拆等
-
支持AMR、传输线、读码系统、贴标机等物流设备无缝对接







 时间:下半年
时间:下半年
 地点:上海
地点:上海












